This category contains blogs on ROS2.
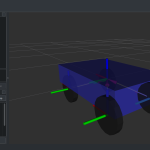
In the previous blogs, we initially defined a robot vehicle in URDF and then defined the same vehicle using Xacros by creating templates and reusing them. In this last blog…
Been a while since I posted the first part in this ROS2 tutorial series, so let's start with a quick recap. In the last blog, we created a simple robotic…
In ROS2, if you have ever worked with coordinate transformations, you’ve likely encountered the acronym URDF at some point. It stands for Unified Robot Description Format. Sounds formal, almost intimidating,…
It is not until you work on an important project that you realize the importance of small things in programming. For me, it is the header file in C++. "Why…
In my previous post on Introduction to ROS, I shared how ROS is an extraordinary framework for robotics applications and is widely used in the industry of automated mobility, aka…